
Whiteboard Sketches


Last updated: 1/22/2024
Here are snapshots of most of our whiteboard & paper sketches. If any are missing or you want to add one, please contact [email protected].
Kickoff - Saturday, January 4th
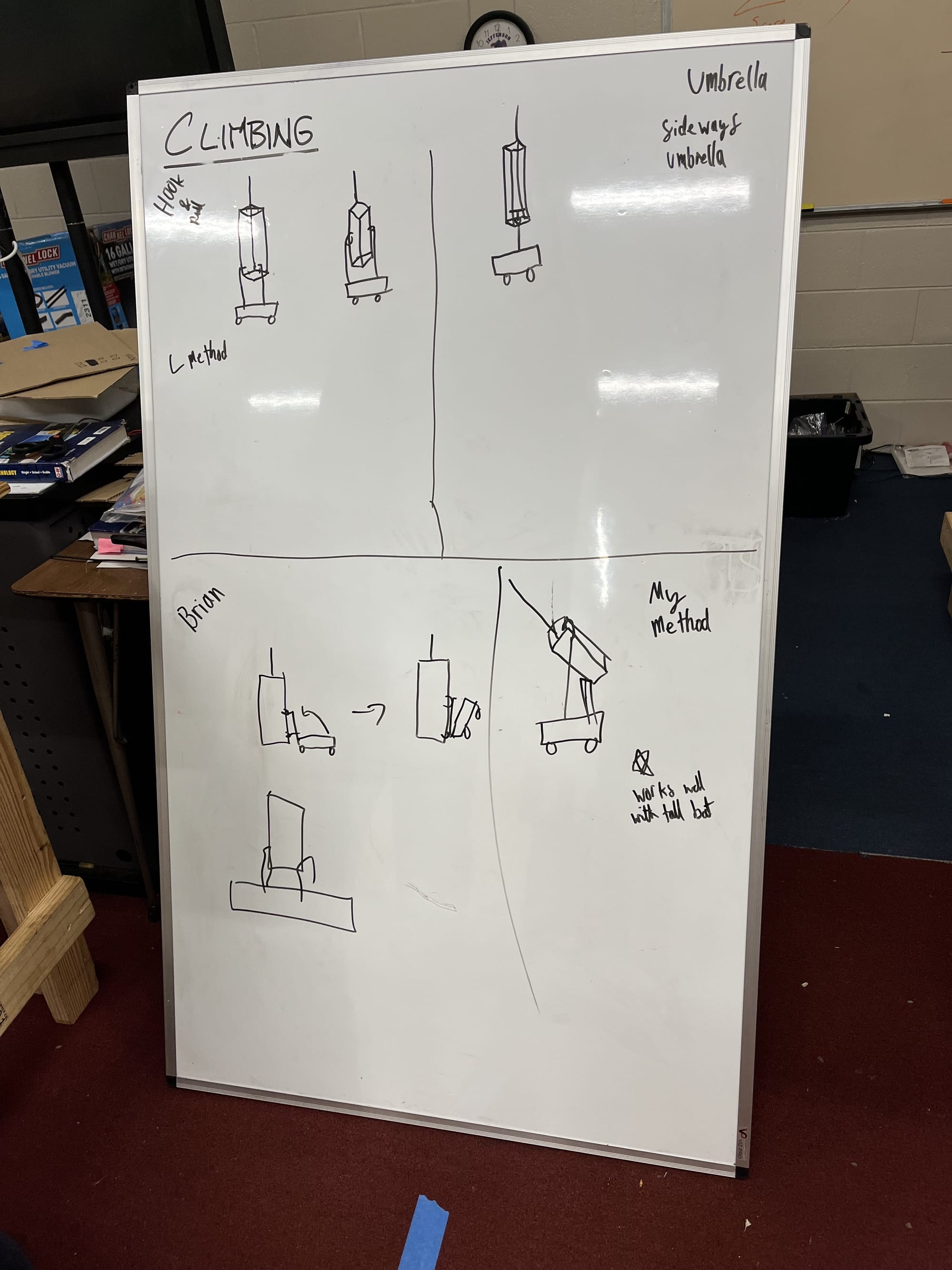
Sketches of potential climbing mechanisms for the robot:
- Hook & Pull design
- Umbrella design to pull inside the cage
- Brian idea
- My method
Other sketches were straightforward or had too many layers to photograph.
Sunday, January 5th
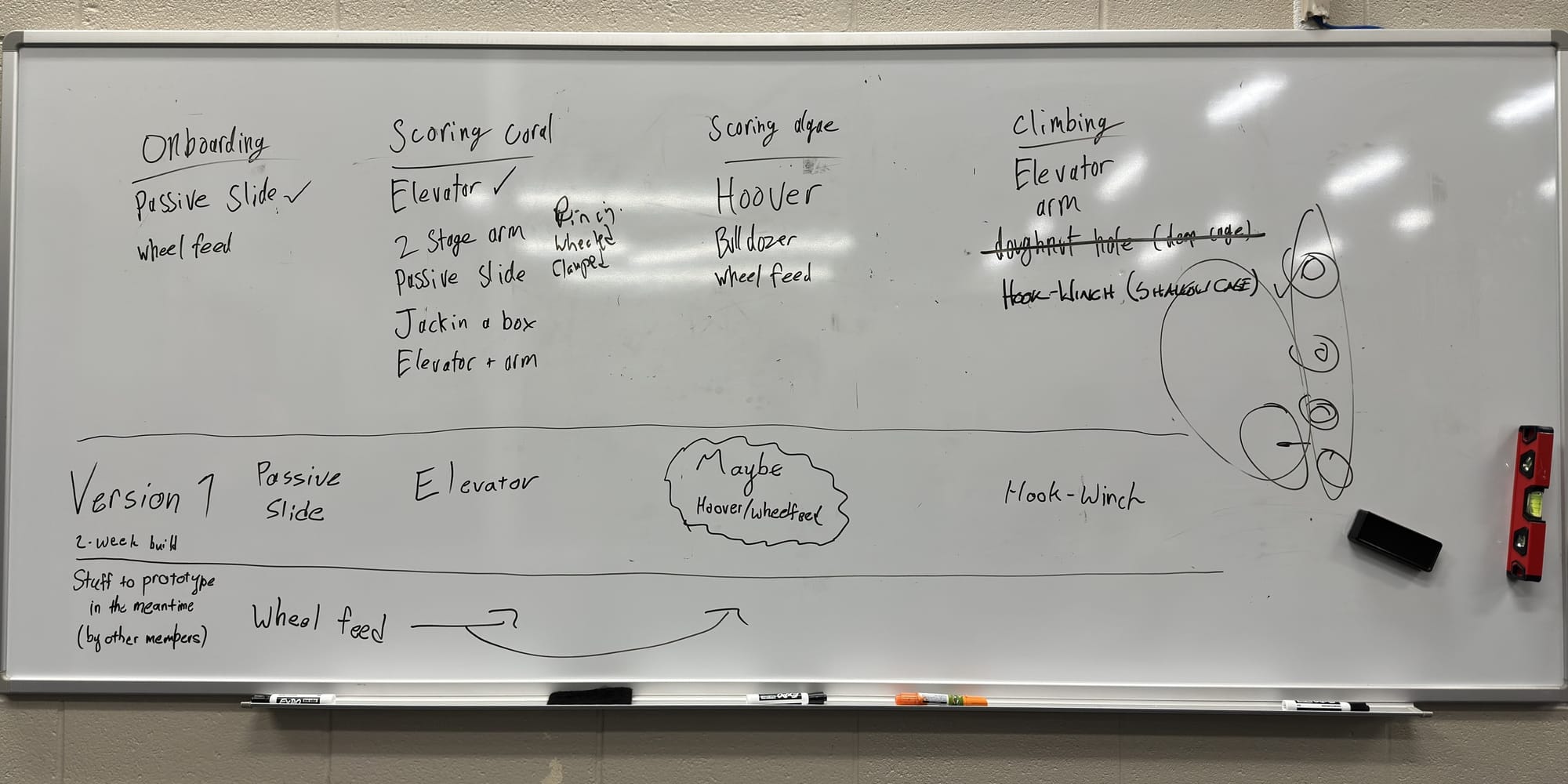
We listed every design and mechanism we could think of for each part of the game. Then, we selected the ones we wanted to test and see if they had potential in our version 1 robot. This version will be our first 2-week build, including the frame, bumpers, and necessary electronics. As marked, it will have these mechanisms: passive slide for onboarding, elevator for coral scoring, and hook winch for climb.
This will be our main focus for the first two weeks. Of course, it won't be the only thing we'll work on. On the side, we'll prototype a wheel-fed mechanism for onboarding, coral, and algae.
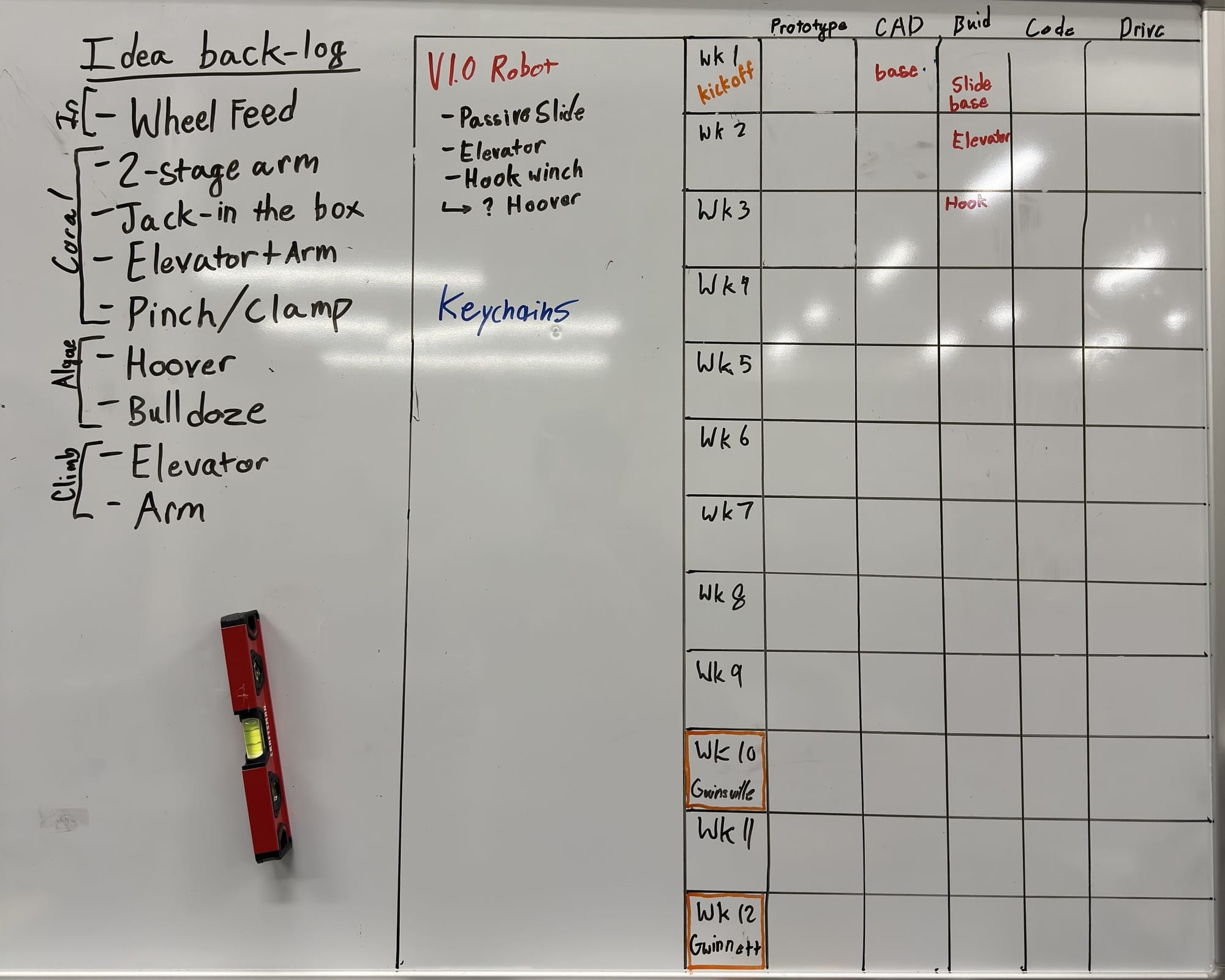
Everything is now organized by weeks!
Monday, January 6th
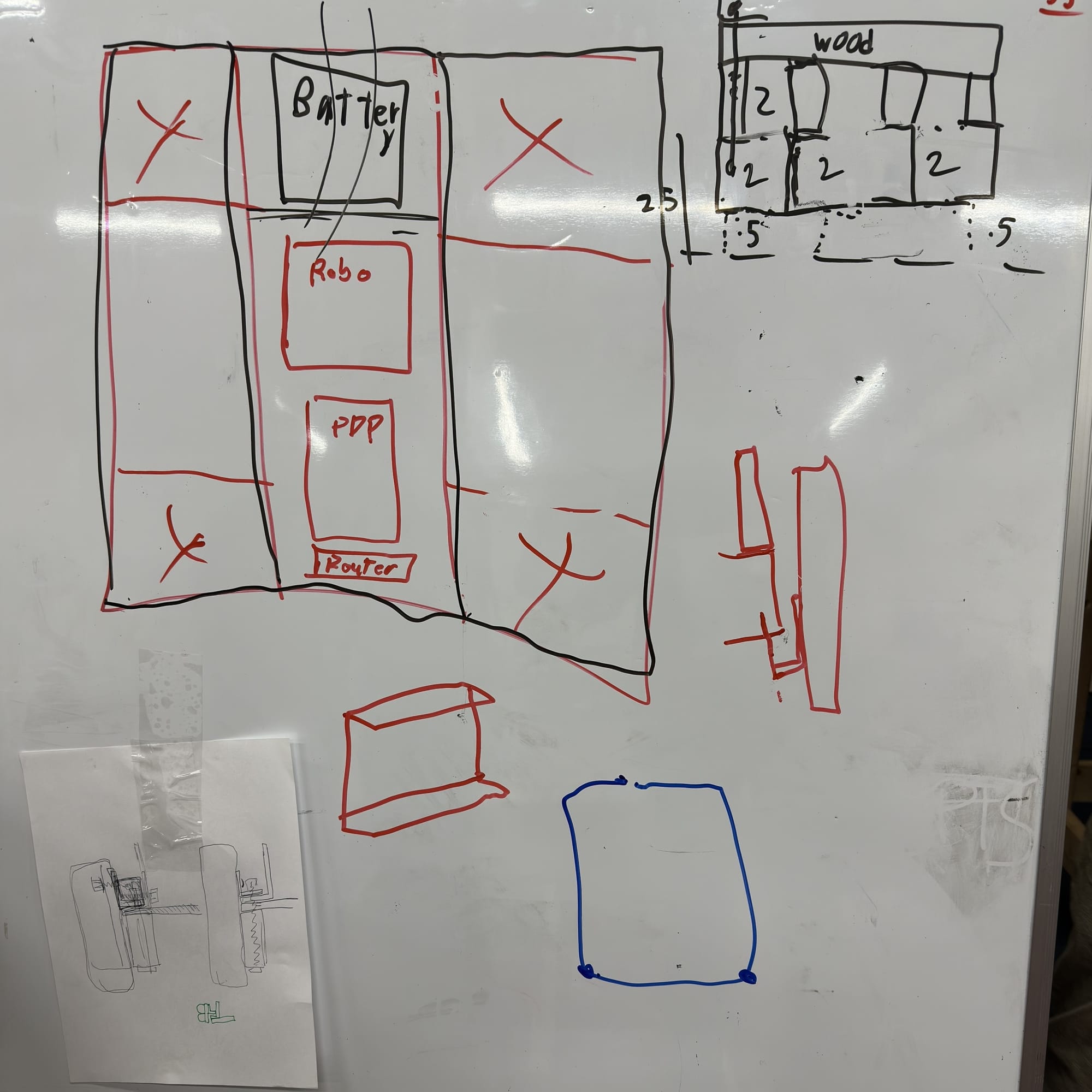
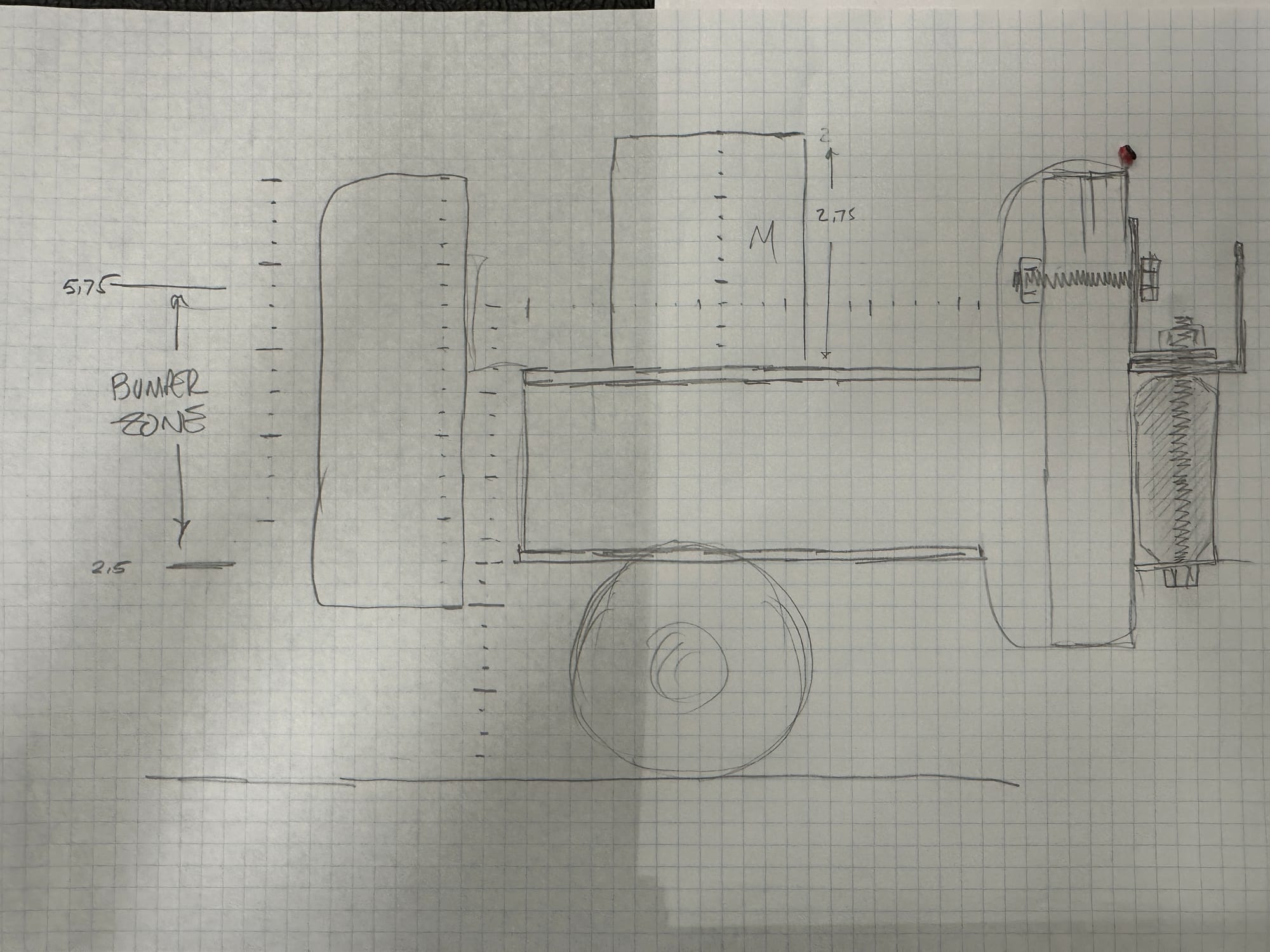
We started the robot frame design and planned out our electronics. The basement electronics are mounted on the bottom side of the panel, sandwiched between plywood/plastic and plexiglass panels. The plexiglass will be velcroed for easy access to electronics. The black marker on the red sketched frame shows the actual 2x1 frames for the robot. There will be two brace frames in the center for additional strength.
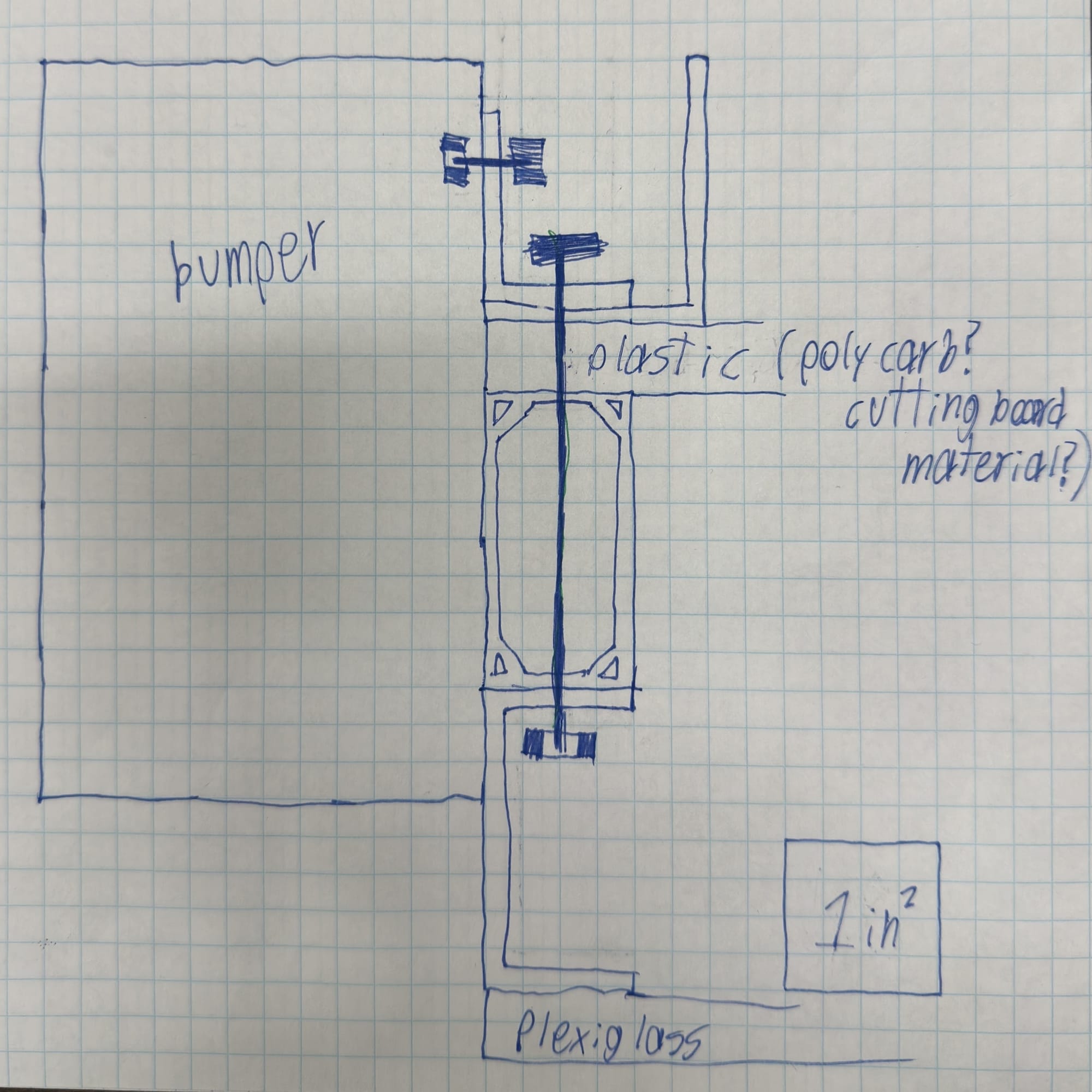
Here is a cross-section of the frame. The top L bracket is attached to the bumper and used to mount it. When mounting the bumper, we'll use nuts to secure it on the screw that extends through the 2x1. The lower L bracket is used for mounting mechanisms on the robot. C channel is used to increase the depth of the electronics basement and allow the battery to slot within the top plate of the base.
Wednesday, January 8th
The new vortex drive motors on the swerve drive caused concern because their casings rotated, which may interfere with the robot's movement if hazards enter its corner.
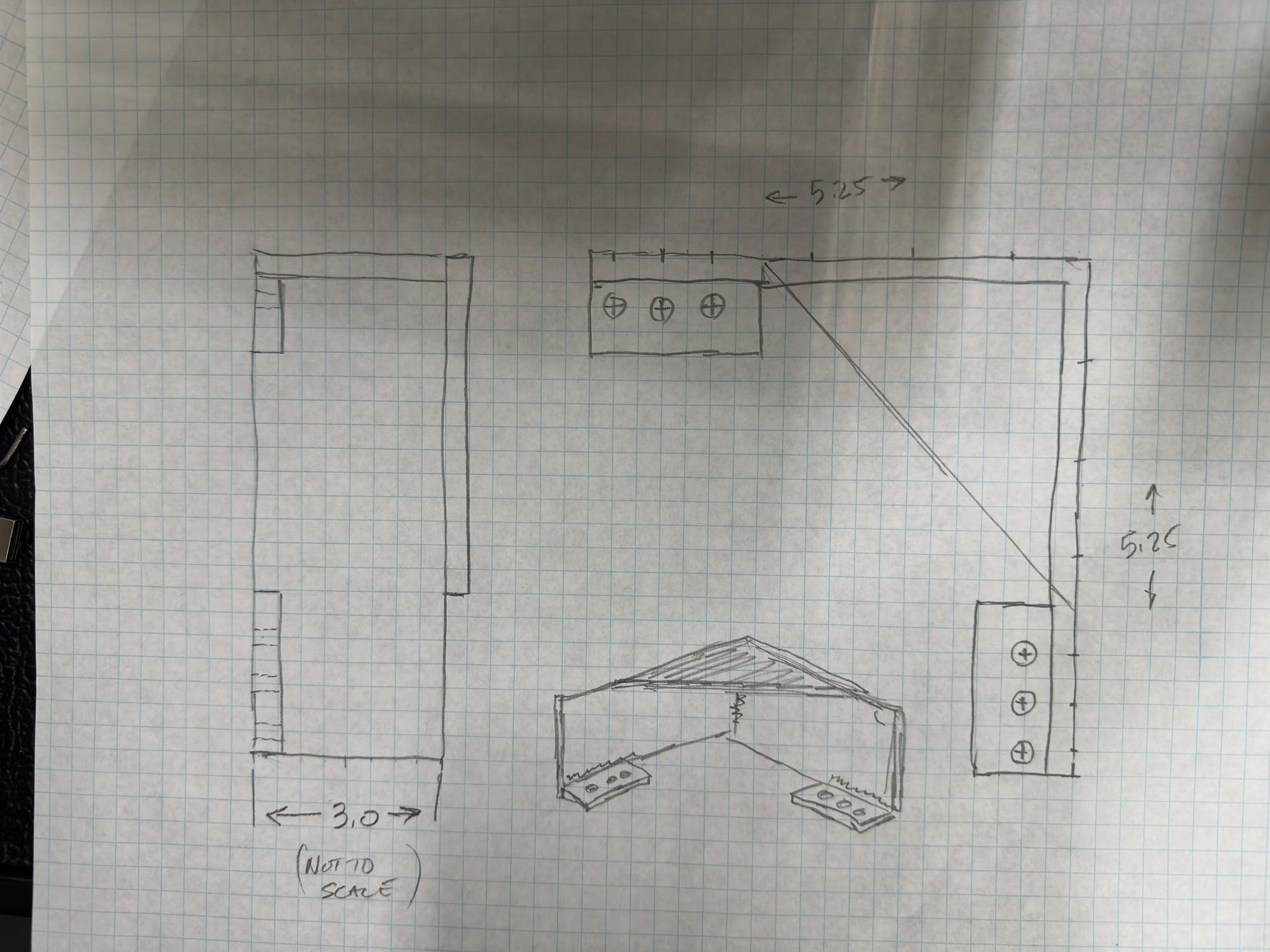
So, to mitigate this issue, a cover is planned to prevent debris and other robots from entering these corners.
That's all for now
Check here regularly for updates, and message me any whiteboard sketches I should post.